Autonomous Road Roller Control
Developed a behavior-based control strategy for autonomous tandem road rollers, enabling precise double Ackermann steering and automated edge compaction.
System Components
Perception & Modeling
- Road Representation & Edge Extraction
- Kinematics Modeling (Bicycle Model)
- Simulator Environment (Unreal Engine)
Control Strategy
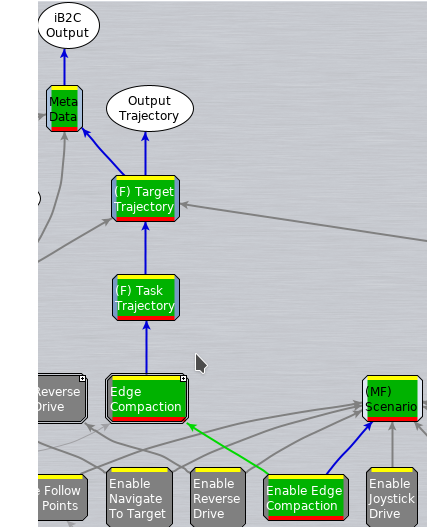
- Trajectory Creation & Tracking
- Crab Steering Behavior
- Automated Edge Cutter Activation
Architecture
- iB2C Behavior-Based Control
- 5G AMMCOA Communication Protocol
- Distributed ROS Nodes
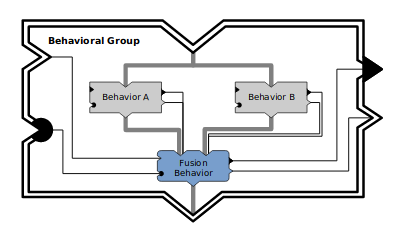
Control Architecture (iB2C)
Utilized the Integrated Behavior-Based Control (iB2C) architecture to manage complex robotic behaviors through stimulation and inhibition signals.

Implementation Logic
Edge Compaction Behavior
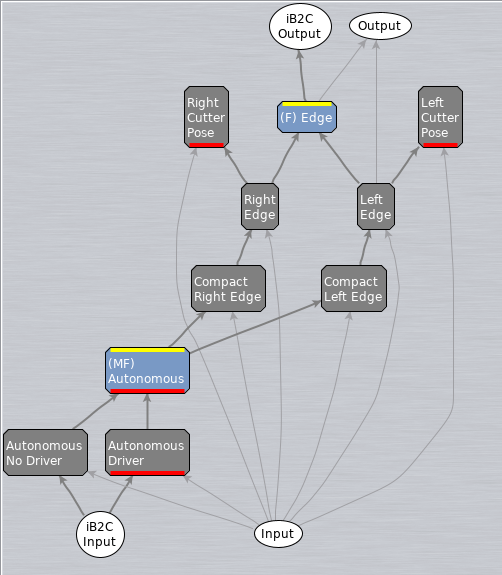
Trajectory Decision
Simulation Results
Unreal Engine Simulation
FinROC GUI Simulation