
Hello, I am Akash
Software Engineer specialized in C# / .NET, IoT, and Automation.
Building intelligent integrated
systems.
Software Engineer specialized in C# / .NET, IoT, and Automation.
Building intelligent integrated
systems.

Traffic scene segmentation using CNNs compressed for embedded devices (91% size reduction).
View Details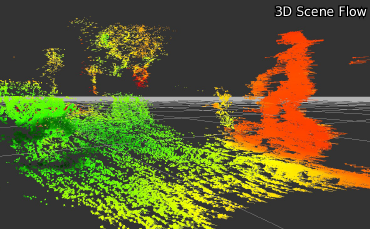
Comprehensive study of variational methods for scene flow estimation and energy formulations.
Read PDF
Trajectory tracking and behavior-based control strategies for precise maneuvering.
View Details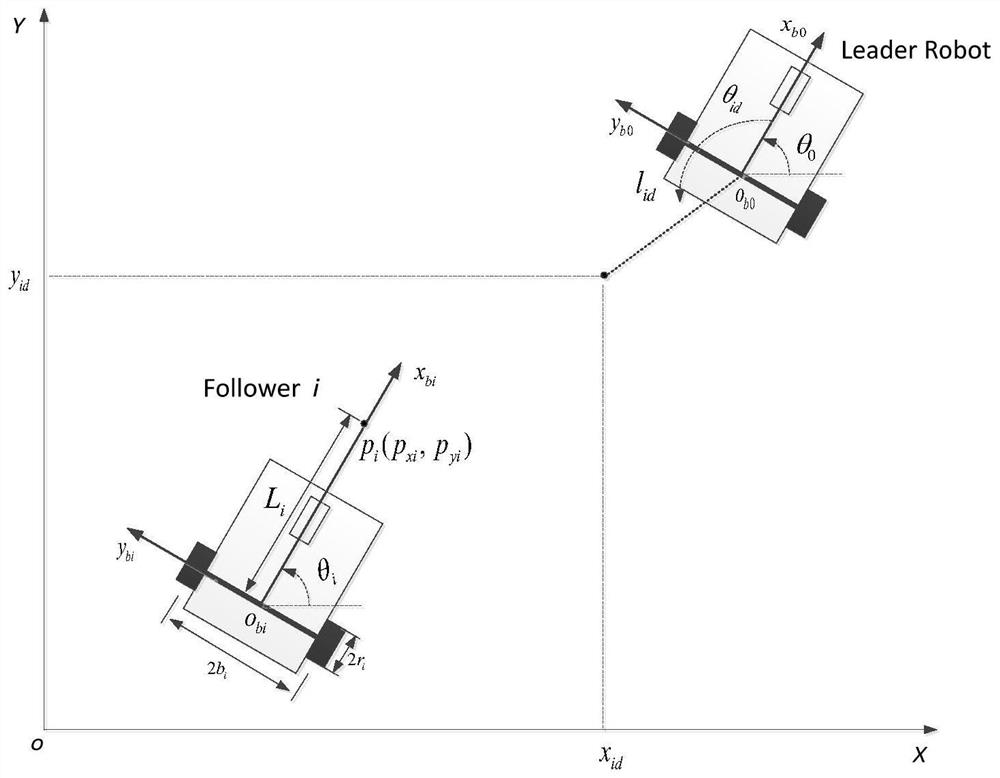
Decentralized formation control using graph theory and consensus algorithms to coordinate robots.
View Details